欢迎来到开云彩票·(中国)官方网站-ios/安卓版/手机APP下载!专业生产:高频加热机,模块中频,高频炉,高频感应加热设备等,提供技术参数、工作原理、打样报价等服务。电话:13526576560微信、QQ同号

生成多摄像头的街景视频对于增加自动驾驶数据集至关重要,解决了对广泛而多样的数据的迫切需求。由于多样性的限制和处理光照条件的挑战,传统的基于渲染的方法越来越多的被基于扩散的方法所取代。然而,基于扩散的方法的一个重要挑战是确保生成的传感器数据同时保持世界范围内的一致性和传感器间的一致性。为了解决这些挑战,我们结合了一个额外的显式世界体素,并提出了世界体素感知多摄像头驱动场景生成器( Wovogen )。该系统专门用来利用4D世界体素作为视频生成的基础元素。我们的模型运行在两个不同的阶段:( i )基于车辆控制序列来设想未来的4D时间世界体素,( ii )生成多摄像机视频,由这个设想的4D时间世界体素和传感器互连性知识。4D世界体素的加入使得WoVoGen不仅可以根据车辆控制输入生成高质量的街景视频,而且可以方便场景编辑任务。
WoVoGen可以预测周围环境并产生合理的视觉反馈,以响应自车的驾驶操作。为了发挥快速发展的生成模型的能力,WoVoGen将结构化的交通信息编码到一个规则的网格框架中,即世界体素,并设计了一种新的基于潜在扩散的世界模型来自回归地执行世界体素预测。
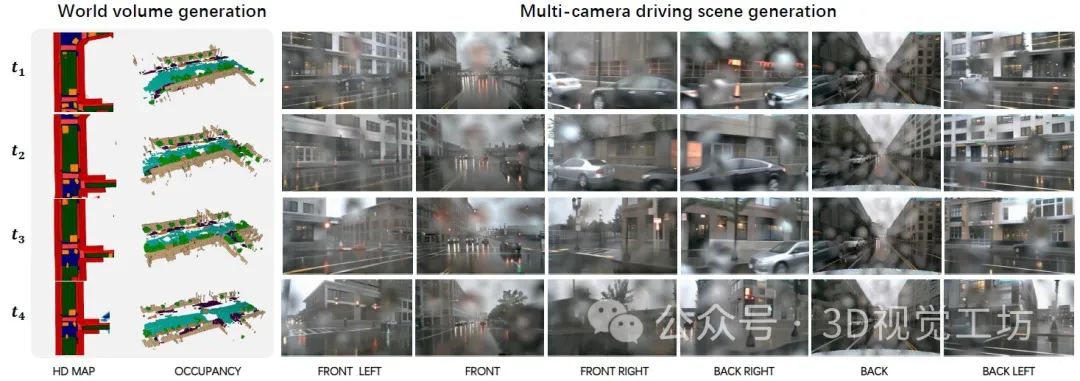
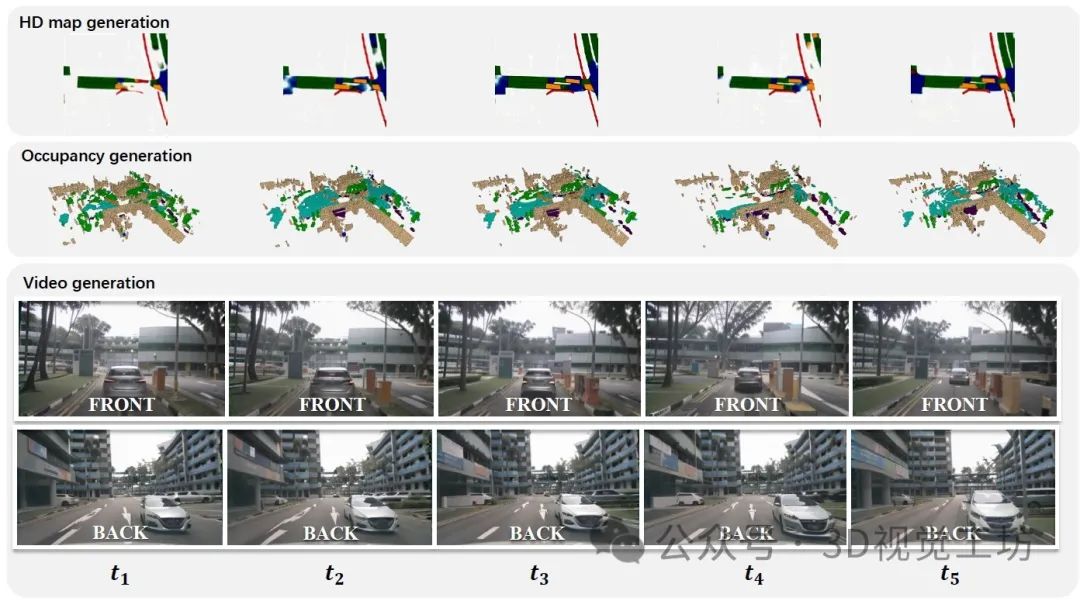
WoVoGen可以很好得生成具有时间一致性的未来世界体素(前两行)。然后,利用世界模型输出的世界体素感知的2D图像特征,合成同时具有多相机一致性和时间一致性的驾驶视频(最下面两行)。
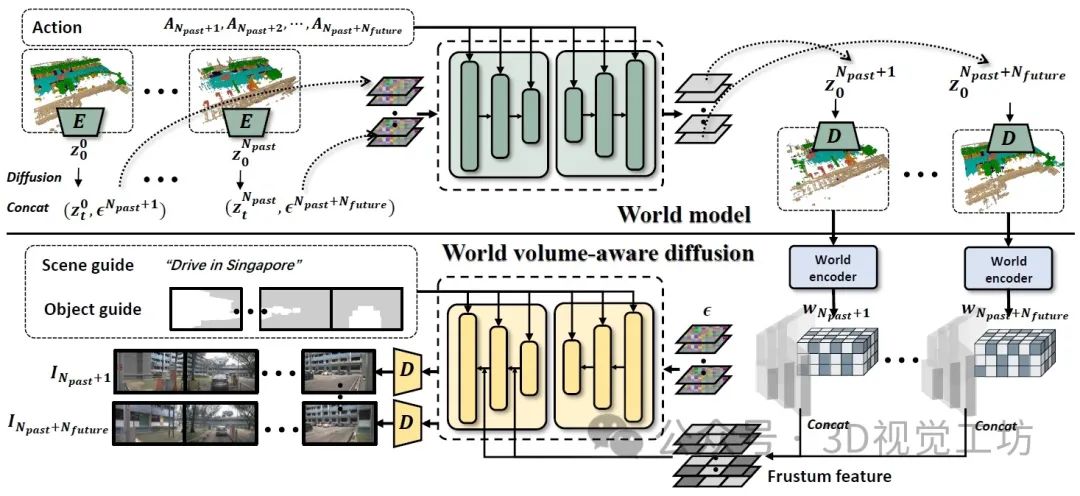
WoVoGen的总体框架。Top:世界模型分支。作者对AutoencoderKL进行微调,从头开始训练4D扩散模型,根据过去的世界体素和自车动作生成未来世界体素。Bottom:世界体素感知合成分支。利用生成的未来量作为输入,通过世界编码器得到Fw。随后的采样产生Fimg,然后进行聚合。该过程通过应用全景扩散来产生未来的视频来完成。
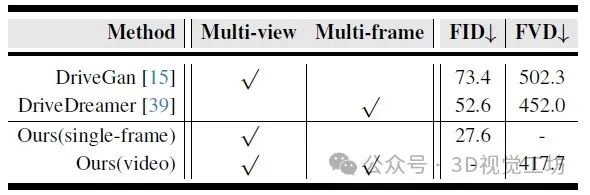
nuScenes验证集上图像/视频生成质量的定量比较。WoVoGen同时实现了多视角和多帧生成,在所有方法中FID和FVD得分最低。
这篇文章提出了WoVoGen,利用4D世界体素将时间和空间数据结合起来,在保证一致性的同时解决了从多传感器数据创建内容的复杂性。这种两阶段系统不仅可以基于车辆控制产生高质量的视频,还可以实现复杂的场景编辑。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

技术展览会2020 ChinaShanghaiInternational Autopilot Technology Exhibition时间:2020年4月15-17日地
k随着汽车电子的日益复杂化以及汽车电子电气架构(EEA)的升级,人们对于联网智能汽车的需求也在逐步上升,大量先进技术往汽车上应用,如高级
汽车和互联汽车的出现对无线连接测试领域提出了更高要求,尤其是汽车产业正在推行的汽车到万物(V2X)技术。这项前沿技术将允许车辆之间实现互通,且掌握周边真实的路况,从而确保最佳的行车安全
习惯、运输行业并更广泛地影响社会。 我们不仅能够将汽车召唤到我们的家门口并在使用后将其送走,
概念想必大家并不陌生,但对于其中发挥“眼睛”作用,眼观六路耳听八方的各种传感器,可能大家未必非常熟悉。通常而言,为获得良好的路况检测结果,一辆
。但大家也知道新型硬件方面成本居高不下,需要时间等到硬件成本不断降低,才能广泛应用。”张璐介绍说:她称在特斯拉事故之后,围绕
安全需要。2. 密集场景大型停车场等车辆聚集密集场景,众多车辆进出停车场,需要对所有车辆实时定位和路径规划调度导航,才能保证
就需要知道车辆在道路的精准位置信息,目前依靠GPS+RTK、惯导、激光雷达、毫米波雷达、雷达、视频视觉,甚至需要更多道路信息,实现V-2X协同,确保车辆
硬件的连接;2. 编写底盘驱动程序,达到根据PYNQ发出的控制信号控制底盘运动的功能;3. 在PYNQ平台编写采集神经网络
申请理由:很喜欢硬件功能完善的机器人,这款机器人上面的多种传感器及器件均用过,传感器和巡线传感器还未接触过,想了解下这种传感器的灵敏度和精度,而且近年来
的冬天来了?“一个致命的事故一定是由多个小的错误组成的。”7月初,特斯拉发表博客叙述了NHTSA(美国国家公路交通安全管理局)正在着手调查第一起Tesla
2021年7月,PIX 的产品持续获得市场和客户的认可,取得高速增长的佳绩,中标了单个项目在数百万元的
ISO26262功能安全合规性验证的任何人来说,他们对此持怀疑态度是可以理解的。这种怀疑态度有相关
汽车研发团队的联合调试打磨,RS-LiDAR-Algorithms 目前已经可以驾驭常见的大部分
员更加安全。但是由于没有进行足够多的测试,无法判断这项技术应用可能会增加还是减少道路事故造成的伤亡人数。丰田研究院
,这是我们测试的视频《基于slam算法的智能机器人》调研分析报告项目背景分析机器人曾经是科幻电影中的形象,可目前已经渐渐走入我们的生活。机器人技术以包含机械、电子、
技术为人们勾勒出了一副美好的未来出行的画面:坐上没有方向盘的汽车,一觉睡到公司门口;甚至我们可能不再拥有一辆汽车,需要出门时共享
自行车什么时候能实现「自己行走」呢?自行车属于欠驱动系统,如果不进行控制就无法实现稳定站立最近,B站野生技术协会野生钢铁侠、「华为天才少年计划」入选者、AI算法工程师稚晖君发布了一个「
”升级路线,其探测技术基础是摄像头(机器视觉)、毫米波雷达、超声雷达;二是以谷歌等互联网公司为代表的“无人
的一部分。鉴于目前激光雷达的高成本,摄像头配合高精度地图是另一种较低成本的技术路线。除了与高精度地图配合为
汽车道路测试。一年过去,通用实现了当初执行董事Michael Simcoe立下的在2017年实现
,因此神经网络也有望在未来的汽车中发挥更大的作用。这些作用将包括承担系统中复杂的信号处理任务,例如雷达模块及语音识别系统。随着神经网络首次应用于车载
概念车,但为什么直至最近无人车才不再被视为科幻小说,而是眼下将实现的性科技产品?追其原因,主要在于,人工智能的显著进展,以及开发无人车的所需技术和硬件
车辆通过C-V2X通信技术带来的高速通信链路,突破车辆自身感知能力、信息交互以及计算能力等方面的局限。在车
汽车已经行驶近30万公里了,非常的强大~~上次参加了重庆新能源汽车峰会,对会上富士通半导体宣讲的一款全景视频汽车实时监控技术平台似乎看到了
训练及推理中应用得越来越多,一些厂商也开始定制自己的 AI 芯片:例如百度的昆仑,将在Autopilot 3.0 上使用自研处理芯片
已成为许多汽车制造商和科技公司的追求,华为作为智能时代的领导者之一,自然也积极布局并投入大量资源研发

